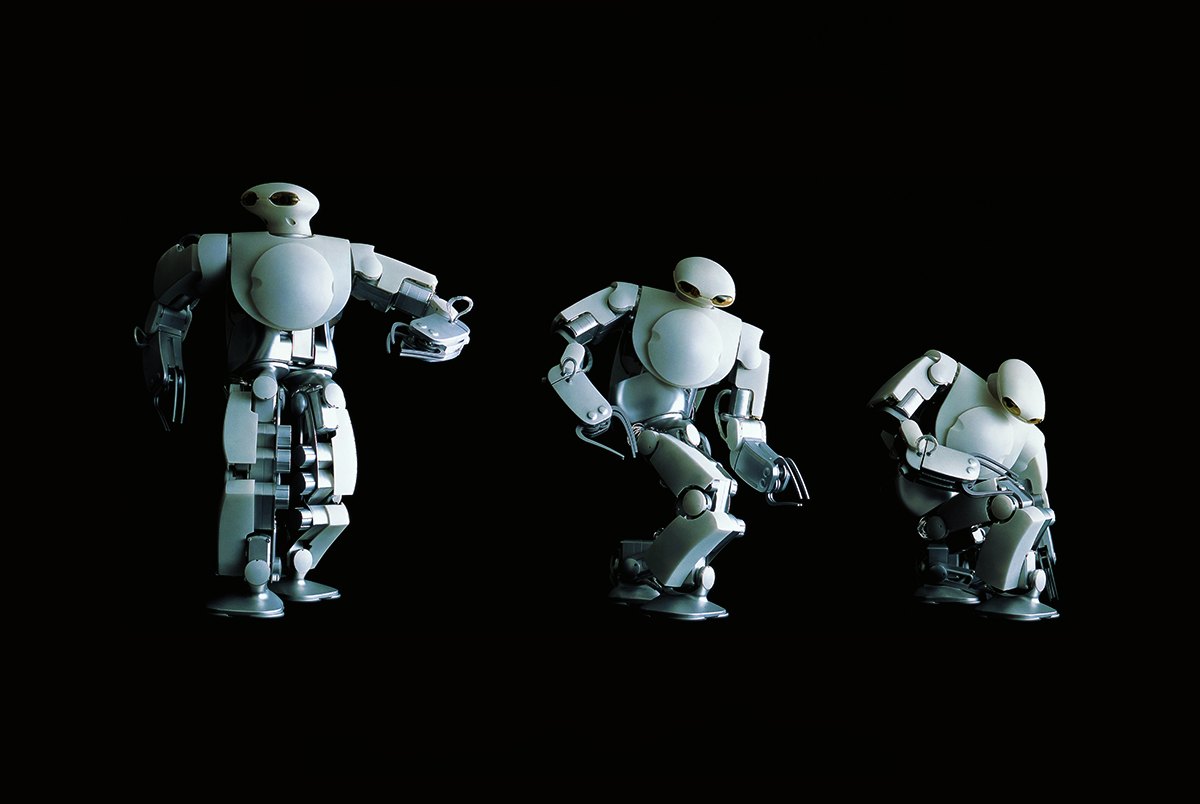
高い機能性をもつ人型ロボット
morph(モルフ)プロジェクトは、ヒューマノイドの要素技術およびそれらの統合技術、さらには全身運動を行う自律制御システムの研究開発を目的に、2001年4月に開始しました。morph3はメタルアスリート、すなわち陸上選手が贅肉をそぎ落としたかのように、「極限まで機能性を追求したボディ」の実現を目指しました。そして、機構部とボディデザインの融合設計手法を採用することで、機能性(高度な知覚機能と機動性能)とメンテナンス性、さらに外観の親和性を合わせ持つシステムの実現に成功しました。


morph1&2は、科学技術振興機構ERATO北野共生システムプロジェクトにおいて開発されたロボットです。 morph3は科学技術振興機構ERATO北野共生システムプロジェクトと工業デザイナーの山中俊治氏が共同開発したロボットです。2003年6月1日よりmorph3の研究開発チームがfuRoへ移籍し、継続して研究開発が行われています。